
Books for Jewish American Heritage Month
In celebration of Jewish American Heritage Month in May, we are sharing books by authors who share their individual stories, experiences, and lives. Find our full collection of books here.





In celebration of Jewish American Heritage Month in May, we are sharing books by authors who share their individual stories, experiences, and lives. Find our full collection of books here.
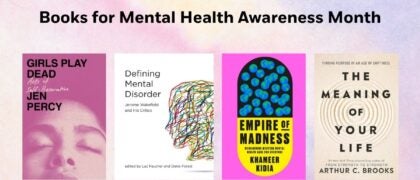
For Mental Health Awareness Month in May, we are sharing books to educate and raise awareness about mental health and the various factors that may affect it, and to provide tools and resources for student wellness. Find our full collection of titles here.
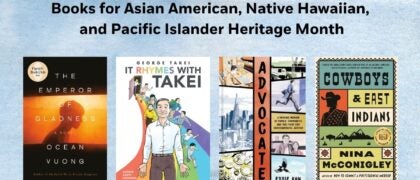
Each May, we honor the stories, histories, and cultures of Asian Americans, Native Hawaiians, and Pacific Islanders. Below is a selection of acclaimed fiction and nonfiction books by AANHPI creators to share with your students this month and throughout the year. Find our full collection of titles for Higher Education here.